Mga kategorya: Mga bagyong elektrisista, Mga de-koryenteng motor at ang kanilang aplikasyon
Bilang ng mga tanawin: 8782
Mga puna sa artikulo: 0
Pag-uuri ng motor
Nakasalalay sa layunin, sa inaasahang mga mode ng kondisyon at kundisyon, sa uri ng suplay ng kuryente, atbp. Lahat ng mga de-koryenteng motor ay maaaring maiuri ayon sa ilang mga parameter: sa pamamagitan ng prinsipyo ng pagkuha ng operating moment, sa pamamagitan ng pamamaraan ng operasyon, sa pamamagitan ng likas na katangian ng supply kasalukuyang, sa pamamagitan ng paraan ng phase control, sa pamamagitan ng uri ng paggulo, atbp. Isaalang-alang natin ang pag-uuri ng mga de-koryenteng motor nang mas detalyado.

Pagkakataon ng metalikang kuwintas
Ang metalikang kuwintas sa mga de-koryenteng motor ay maaaring makuha sa isa sa dalawang mga paraan: sa pamamagitan ng prinsipyo ng magnetic hysteresis o pulos magnetoelectric. Hysteresis motor tumatanggap ng isang metalikang kuwintas sa pamamagitan ng hysteresis sa panahon ng pag-magnet ng pagbabalik ng isang magnetically solid rotor, habang magnetoelectric motor metalikang kuwintas ay ang resulta ng pakikipag-ugnay ng tahasang magnetic pole ng rotor at stator.

Ngayon, ang mga motor na magnetoelectric ay nararapat na bumubuo ng bahagi ng leon ng kabuuang kasaganaan ng mga de-koryenteng motor na ginagamit sa napakaraming patlang. Nahahati sila sa likas na katangian ng supply kasalukuyang sa:
-
DC motor
-
AC motor
-
mga unibersal na makina.
Hindi tulad ng isang magnetoelectric motor, ang magnetization ng rotor na may kaugnayan sa geometrical axes ay pinapayagan sa hysteresis motor, at ang partikular na tampok na ito ay hindi pinahihintulutan ang mga pangkalahatang batas ng magnetoelectric na conversion na mapalawak sa kasabay na operasyon ng motor hysteresis.
Panoorin - Ang aparato at prinsipyo ng pagkilos ng pinakasimpleng motor na de koryente at Paano gumawa ng isang simpleng motor na de koryente sa loob ng 10 minuto

Pag-uuri ng motor
DC motor

Sa isang motor na pinapagana ng direktang kasalukuyang, ang motor mismo ay may pananagutan sa paglipat ng mga phase. Nangangahulugan ito na kahit na ang isang direktang kasalukuyang ay ibinibigay sa electric machine, gayunpaman, dahil sa pagkilos ng mga panloob na mekanismo ng aparato, ang magnetic field ay lumiliko upang mapanatili ang rotor metalikang kuwintas (na parang isang alternating kasalukuyang kumikilos sa stator na paikot-ikot).

Ang aparato at pagpapatakbo ng DC motor: 1 - anchor, 2 - baras, 3 - kolektor ng plato, 4 - brush Assembly, 5 - armature magnetic circuit, 6 - inductor magnetic circuit, 7 - field windings, 8 - inductor body, 9 - side cover 10 - tagahanga, 11 - paa, 12 - goma.
Ang isang DC motor ay binubuo ng isang nakapirming bahagi na tinatawag na isang inductor at isang gumagalaw na bahagi na tinatawag na isang angkla. Depende sa disenyo, ang permanenteng magneto ay maaaring matatagpuan sa inductor sa inductor, na pinapasimple ang disenyo, ngunit hindi pinapayagan kang ayusin ang magnetic flux ng motor, na nakakaapekto sa bilis nito.
Sa pamamagitan ng pamamaraan ng paglikha ng isang gumagalaw na patlang na magnet, ang DC motor ay nahahati sa:
-
balbula (walang brush)
-
kolektor.
Ang mga motor na brushless ay may mga elektronikong inverters sa kanilang disenyo, na isinasagawa ang phase switch. Ang mga motor ng kolektor ay ayon sa kaugalian na gamit mga yunit ng kolektor ng brush, na idinisenyo upang pulos mekanikal na i-synchronize ang lakas ng mga windings ng motor na may pag-ikot ng mga gumagalaw na bahagi nito.
Kaguluhan ng mga motor ng kolektor

Ayon sa pamamaraan ng paggulo, ang mga motor ng kolektor ay sumusunod sa mga uri: na may independiyenteng paggulo mula sa mga permanenteng magnet o mula sa mga electromagnets, o sa paggulo sa sarili. Ang permanenteng magnet na pagganyak ng magnet ay naglalaman ng mga magnet sa rotor.Ang mga motor na nabigla sa sarili ay may isang espesyal na angkla na paikot-ikot sa rotor, na maaaring konektado nang kahanay, sunud-sunod o halo-halong may isang espesyal na paikot-ikot na paggulo.
Ripple motor
Ang isang pulsed kasalukuyang motor ay katulad sa isang DC motor. Ang pagkakaiba ay namamalagi sa pagkakaroon ng mga may linya na pagsingit sa core, pati na rin ang mga karagdagang mga linya na may linya. Bilang karagdagan, ang kasalukuyang ripple motor ay may paikot-ikot na kabayaran. Ang ganitong mga makina ay ginagamit sa mga electric locomotives, kung saan sila ay karaniwang pinapagana naayos na alternating kasalukuyang.
AC motor
Ang mga AC motor, tulad ng ipinahihiwatig ng pangalan, ay pinapagana ng alternating kasalukuyang. Ang mga ito ay magkasabay at hindi nakakasabay.
Para sa mga kasabay na AC motor, ang stator magnetic field ay gumagalaw sa parehong anggular na tulin bilang rotor, habang ang mga asynchronous motor ay laging may isang tiyak na lag (nailalarawan sa pamamagitan ng halaga ng slip) - ang stator magnetic field sa paggalaw nito ay tila nasa unahan ng rotor, na naman naman ay palaging naghahangad na makibalita sa kanya.
Ang mga de-koryenteng motor na naka-sync (daan-daang kilowatt) ay may mga windings sa bukid sa rotor. Ang mga rotors ng hindi gaanong malakas na kasabay na motor ay nilagyan ng permanenteng magnet, na bumubuo ng mga poste. Ang mga motor ng Hysteresis din, sa prinsipyo, magkasabay.
Mga motor ng stepper - Ito ay isang espesyal na kategorya ng mga kasabay na motor na may mataas na katumpakan ng kontrol ng bilis, hanggang sa isang discrete na bilang ng hakbang.
Ang mga naka-sync na jet engine ay pinapagana sa pamamagitan ng isang inverter.Tingnan ang paksang ito:Mga modernong kasabay na jet engine

Ang mga Asynchronous AC motor ay nakikilala sa pamamagitan ng ang katunayan na ang kanilang anggular na tulin ng pag-ikot ng rotor ay palaging mas mababa sa angular na tulin ng pag-ikot ng patlang na pang-stator. Induction motor ay iisang yugto (sa panimulang paikot-ikot), ang dalawang yugto (ang isang capacitor motor ay nalalapat din sa kanila), tatlong-phase at multiphase.
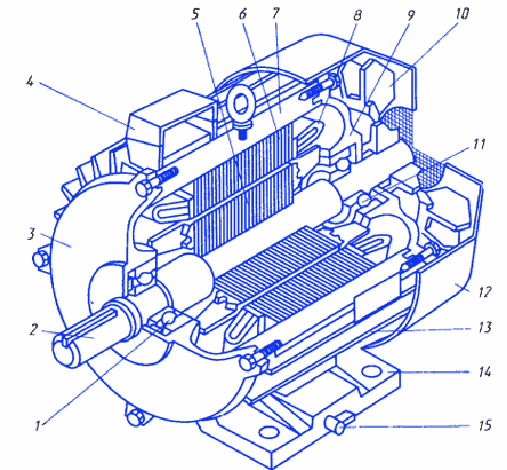
Three-phase squirrel-cage induction motor design
Ang isang asynchronous electric motor ay binubuo ng parehong isang nakapirming (stator) na bahagi at isang gumagalaw (rotor) na bahagi, na kung saan ay gaganapin ng mga bearings 1 at 11 na naka-install sa gilid na sumasakop sa 3 at 9. Ang rotor ay binubuo ng isang baras 2, kung saan ang isang magnetic circuit 5 na may isang paikot-ikot na naayos. Ang motor stator ay binubuo ng isang pabahay 7, kung saan nakakabit ang isang magnetic circuit 6. Ang isang three-phase na paikot-ikot ay inilalagay sa mga grooves ng magnetic circuit 8. Ang takip ng kahon ng terminal 4 at ang impeller na proteksiyon na takip 12 ay nakakabit din sa pabahay.
Ang phase rotor ay may isang three-phase na paikot-ikot, na ginawa ng uri ng paikot-ikot na stator. Ang ilang mga dulo ng coil ay konektado sa zero point ("bituin"), habang ang iba ay konektado sa mga singsing. Ang mga brush ay ipinataw sa mga singsing, paggawa ng mga slide sa contact na may paikot-ikot na rotor. Gamit ang disenyo na ito, posible na ikonekta ang isang simula o pag-aayos ng rheostat sa paikot-ikot na rotor, na nagpapahintulot sa pagbabago ng elektrikal na pagtutol sa circuit rotor.
Tingnan din - Mga pagkakaiba sa pagitan ng induction motor at DC motor, Mga pagkakaiba sa pagitan ng ardilya-hawla at mga motor na naka-lock ang induction motor
Isang motor na walang tulin na may dalas na converter para sa maayos na pagkontrol sa bilis ng pag-ikot ng baras sa pamamagitan ng pagbabago ng dalas at supply ng boltahe:

Mga Universal Motors ng Brush
Ang makina ng kolektor ng unibersal ay maaaring gumana nang hindi bababa sa direkta, kahit na mula sa alternating kasalukuyang (50 Hz). May serial excitation, ginagamit sa mga gamit sa elektrikal na sambahayankung saan ang isang bilis ng pag-ikot mas mataas kaysa sa maximum para sa maginoo AC motor na 3000 rpm ay kinakailangan. Bilang isang patakaran, ang kapangyarihan ng naturang mga makina ay hindi lalampas sa 200 watts. Nakakain control ng thyristor bilis ng unibersal na engine.
Ang isang pinahusay na bersyon ng unibersal na motor ay isang kasabay na motor na may sensor na posisyon ng rotor, kung saan ang papel ng kolektor ay nilalaro ng isang elektronikong inverter.
Iba pang mga kapaki-pakinabang na artikulo sa paksang ito:
Mga uri ng mga de-koryenteng motor at mga prinsipyo ng kanilang trabaho
Mga katangian ng mga motor sa induction
Paano matukoy ang bilis ng pag-ikot ng isang de-koryenteng motor
Paano suriin ang de-koryenteng motor
Paano i-disassemble ang isang induction motor
Mga uri at pag-aayos ng mga rebolusyon ng bilis ng kolektor ng bilis
Tingnan din sa electro-tl.tomathouse.com
: